 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXuanwu: Evolving General Multimodal Models into an Industrial-Grade Foundation for Content Ecosystems
Mar 31, 2026In recent years, multimodal large models have continued to improve on general benchmarks. However, in real-world content moderation and adversarial settings, mainstream models still suffer from degraded generalization and catastrophic forgetting because of limited fine-grained visual perception and insufficient modeling of long-tail noise. In this paper, we present Xuanwu VL-2B as a case study of how general multimodal models can be developed into an industrial-grade foundation model for content ecosystems. The model adopts a compact InternViT-300M + MLP + Qwen3 1.7B architecture, balancing fine-grained visual perception, language-semantic alignment, and deployment cost within an approximately 2B-parameter budget. To balance business specialization with the retention of general capabilities, we developed a data iteration and curation mechanism and trained the model through a progressive three-stage pipeline: pre-training, mid-training, and post-training. Ablation studies and offline business evaluations show that Xuanwu VL-2B achieves an average score of 67.90 across seven OpenCompass multimodal metrics (vs. 64.27 for InternVL 3.5 2B), an average recall of 94.38% over seven independent business moderation tasks, and a weighted overall recall of 82.82% on policy-violating text in challenging adversarial OCR scenarios, outperforming Gemini-2.5-Pro (76.72%). These results show that, under a limited parameter budget, Xuanwu VL-2B achieves a practical balance among business alignment, visual perception, general capability retention, and deployment cost.
Wetland mapping from sparse annotations with satellite image time series and temporal-aware segment anything model
Jan 16, 2026Accurate wetland mapping is essential for ecosystem monitoring, yet dense pixel-level annotation is prohibitively expensive and practical applications usually rely on sparse point labels, under which existing deep learning models perform poorly, while strong seasonal and inter-annual wetland dynamics further render single-date imagery inadequate and lead to significant mapping errors; although foundation models such as SAM show promising generalization from point prompts, they are inherently designed for static images and fail to model temporal information, resulting in fragmented masks in heterogeneous wetlands. To overcome these limitations, we propose WetSAM, a SAM-based framework that integrates satellite image time series for wetland mapping from sparse point supervision through a dual-branch design, where a temporally prompted branch extends SAM with hierarchical adapters and dynamic temporal aggregation to disentangle wetland characteristics from phenological variability, and a spatial branch employs a temporally constrained region-growing strategy to generate reliable dense pseudo-labels, while a bidirectional consistency regularization jointly optimizes both branches. Extensive experiments across eight global regions of approximately 5,000 km2 each demonstrate that WetSAM substantially outperforms state-of-the-art methods, achieving an average F1-score of 85.58%, and delivering accurate and structurally consistent wetland segmentation with minimal labeling effort, highlighting its strong generalization capability and potential for scalable, low-cost, high-resolution wetland mapping.
Democratizing planetary-scale analysis: An ultra-lightweight Earth embedding database for accurate and flexible global land monitoring
Jan 16, 2026The rapid evolution of satellite-borne Earth Observation (EO) systems has revolutionized terrestrial monitoring, yielding petabyte-scale archives. However, the immense computational and storage requirements for global-scale analysis often preclude widespread use, hindering planetary-scale studies. To address these barriers, we present Embedded Seamless Data (ESD), an ultra-lightweight, 30-m global Earth embedding database spanning the 25-year period from 2000 to 2024. By transforming high-dimensional, multi-sensor observations from the Landsat series (5, 7, 8, and 9) and MODIS Terra into information-dense, quantized latent vectors, ESD distills essential geophysical and semantic features into a unified latent space. Utilizing the ESDNet architecture and Finite Scalar Quantization (FSQ), the dataset achieves a transformative ~340-fold reduction in data volume compared to raw archives. This compression allows the entire global land surface for a single year to be encapsulated within approximately 2.4 TB, enabling decadal-scale global analysis on standard local workstations. Rigorous validation demonstrates high reconstructive fidelity (MAE: 0.0130; RMSE: 0.0179; CC: 0.8543). By condensing the annual phenological cycle into 12 temporal steps, the embeddings provide inherent denoising and a semantically organized space that outperforms raw reflectance in land-cover classification, achieving 79.74% accuracy (vs. 76.92% for raw fusion). With robust few-shot learning capabilities and longitudinal consistency, ESD provides a versatile foundation for democratizing planetary-scale research and advancing next-generation geospatial artificial intelligence.
Subgraph Extraction-based Feedback-guided Iterative Scheduling for HLS
Jan 22, 2024



This paper proposes ISDC, a novel feedback-guided iterative system of difference constraints (SDC) scheduling algorithm for high-level synthesis (HLS). ISDC leverages subgraph extraction-based low-level feedback from downstream tools like logic synthesizers to iteratively refine HLS scheduling. Technical innovations include: (1) An enhanced SDC formulation that effectively integrates low-level feedback into the linear-programming (LP) problem; (2) A fanout and window-based subgraph extraction mechanism driving the feedback cycle; (3) A no-human-in-loop ISDC flow compatible with a wide range of downstream tools and process design kits (PDKs). Evaluation shows that ISDC reduces register usage by 28.5% against an industrial-strength open-source HLS tool.
VisDrone-CC2020: The Vision Meets Drone Crowd Counting Challenge Results
Jul 19, 2021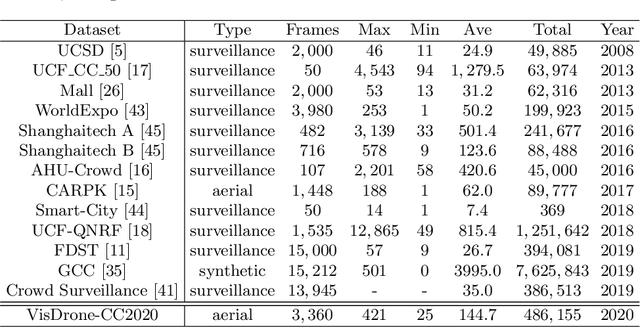
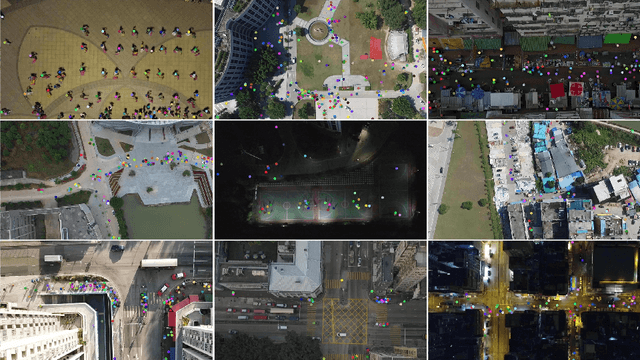
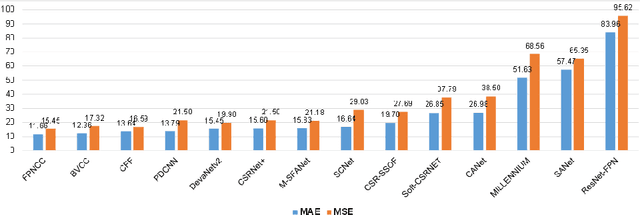
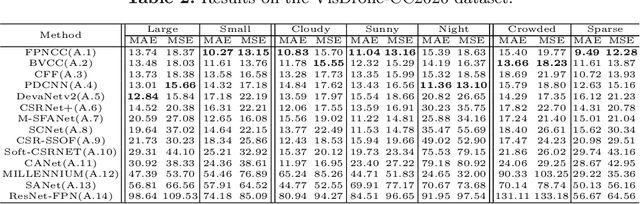
Crowd counting on the drone platform is an interesting topic in computer vision, which brings new challenges such as small object inference, background clutter and wide viewpoint. However, there are few algorithms focusing on crowd counting on the drone-captured data due to the lack of comprehensive datasets. To this end, we collect a large-scale dataset and organize the Vision Meets Drone Crowd Counting Challenge (VisDrone-CC2020) in conjunction with the 16th European Conference on Computer Vision (ECCV 2020) to promote the developments in the related fields. The collected dataset is formed by $3,360$ images, including $2,460$ images for training, and $900$ images for testing. Specifically, we manually annotate persons with points in each video frame. There are $14$ algorithms from $15$ institutes submitted to the VisDrone-CC2020 Challenge. We provide a detailed analysis of the evaluation results and conclude the challenge. More information can be found at the website: \url{http://www.aiskyeye.com/}.
* The method description of A7 Mutil-Scale Aware based SFANet (M-SFANet) is updated and missing references are added
Net2: A Graph Attention Network Method Customized for Pre-Placement Net Length Estimation
Nov 27, 2020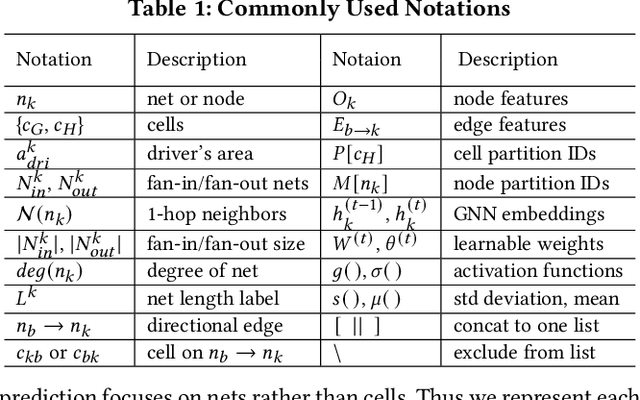
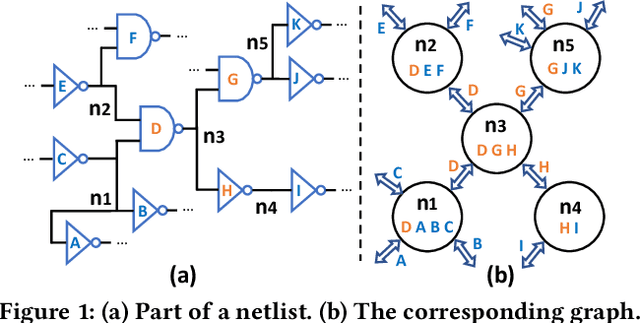
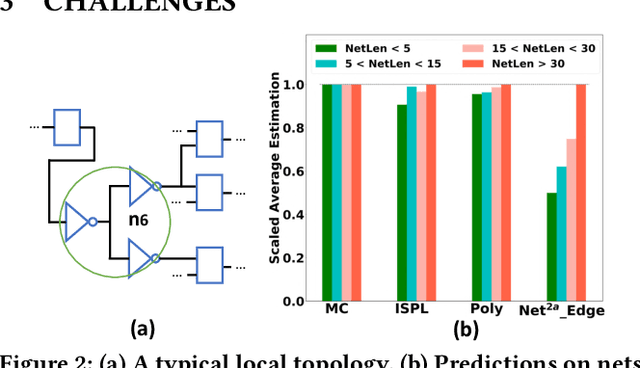
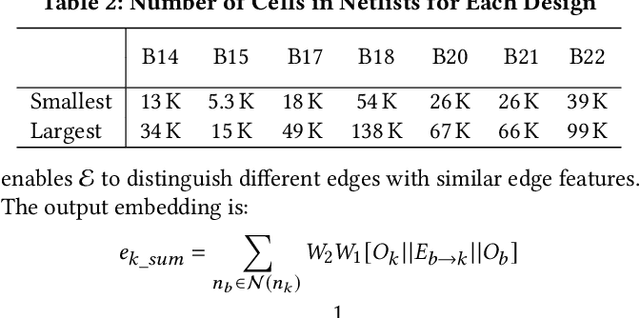
Net length is a key proxy metric for optimizing timing and power across various stages of a standard digital design flow. However, the bulk of net length information is not available until cell placement, and hence it is a significant challenge to explicitly consider net length optimization in design stages prior to placement, such as logic synthesis. This work addresses this challenge by proposing a graph attention network method with customization, called Net2, to estimate individual net length before cell placement. Its accuracy-oriented version Net2a achieves about 15% better accuracy than several previous works in identifying both long nets and long critical paths. Its fast version Net2f is more than 1000 times faster than placement while still outperforms previous works and other neural network techniques in terms of various accuracy metrics.
Fast IR Drop Estimation with Machine Learning
Nov 26, 2020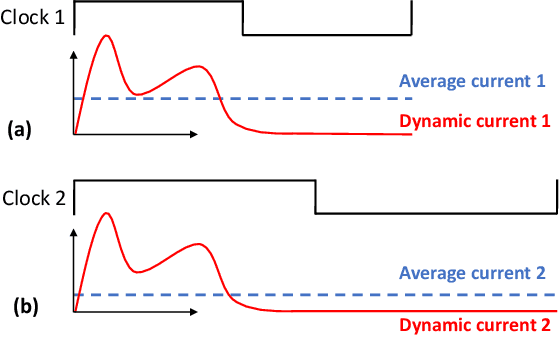
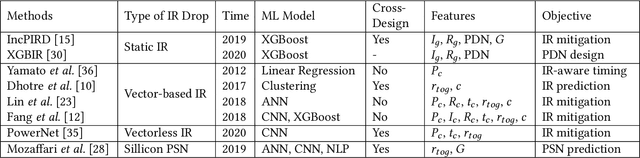


IR drop constraint is a fundamental requirement enforced in almost all chip designs. However, its evaluation takes a long time, and mitigation techniques for fixing violations may require numerous iterations. As such, fast and accurate IR drop prediction becomes critical for reducing design turnaround time. Recently, machine learning (ML) techniques have been actively studied for fast IR drop estimation due to their promise and success in many fields. These studies target at various design stages with different emphasis, and accordingly, different ML algorithms are adopted and customized. This paper provides a review to the latest progress in ML-based IR drop estimation techniques. It also serves as a vehicle for discussing some general challenges faced by ML applications in electronics design automation (EDA), and demonstrating how to integrate ML models with conventional techniques for the better efficiency of EDA tools.